



Sajjad Maleki (Eutopia PhD co-fund program, CYU and Warwick University), PhD candidate in the ETIS ICI team, received …
Arsenia Chorti (Ersi) has been recognized as one of the “100 Brilliant and Inspiring Women in 6G” for …
Journée organisée par Arnaud Blanchard (ETIS) et Jonathan Dumon (GIPSA-Lab). Les vidéos de la journée du réseau métier …
Clara Brémond, docteure ETIS 2023, fait partie des sportifs cergyssois qui formeront la haie d’honneur de la flamme olympique, …

Mercredi 3 juillet a eu lieu l’après-midi de cohésion d’ETIS. Elle a débuté par un séminaire intitulé “Recherches actuelles …
Dans le cadre de l’appel ANR JCJC 2024, trois jeunes enseignants-chercheurs / enseignantes-cherchercheuses d’ETIS ont eu leurs projets …

Inbar Fijalkow, professeur des universités et membre d’ETIS, vient de présider le sous-comité de l’ANR en Intelligence Artificielle …
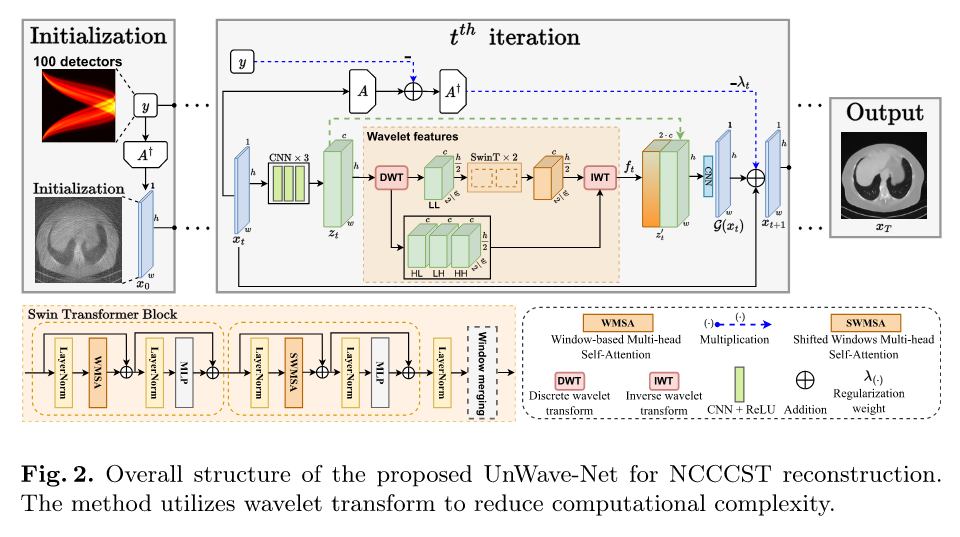
“UnWave-Net: Unrolled Wavelet Network for Compton Tomography Image Reconstruction”, paper by Ishak Ayad, Cécilia Tarpau, Javier Cebeiro and …
La thèse de Adèle Cormier, intitulée “Influence du changement climatique sur les oeuvres monumentales : des données de …