



PhD student day – JDD 2024 On Thursday March 21, ETIS held its PhD students day. This annual event is an opportunity for the laboratory’s doctoral researchers to present their […]
Ten inspiring women scientists from the four teams of the ETIS lab share their career path, their passion for their research domain, and their opinions on gender parity questions in […]
On 8 March 2024, many poppies grew in the ETIS laboratory. Fortunately, this is not a novelty, but rather a trend! At the initiative of the Femmes et Maths association […]
La thèse de Adèle Cormier, intitulée “Influence du changement climatique sur les oeuvres monumentales : des données de …
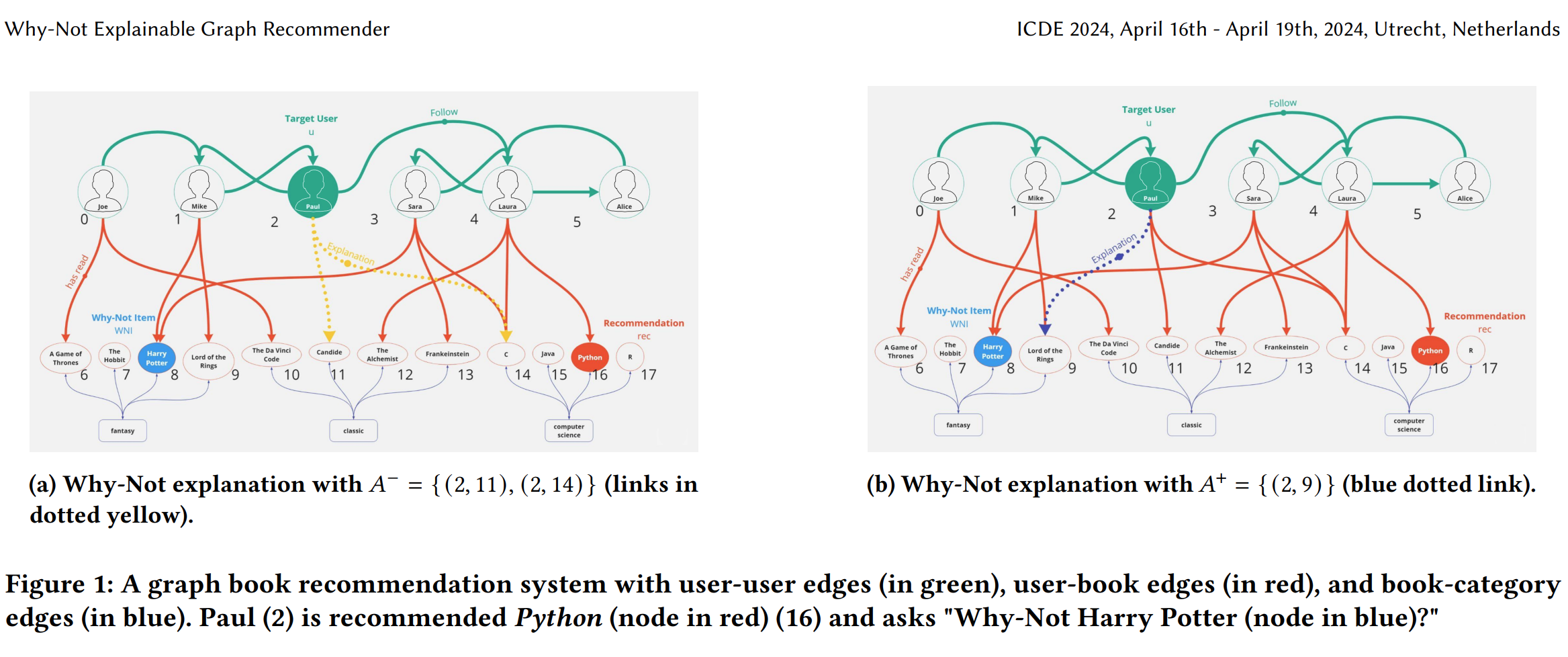
Researchers from the MIDI team ETIS will present their work in the ICDE 2024 conference. Why-Not Explainable Graph …
À l’occasion du symposium “IA et Santé mentale” de l’université de Caen, Ghilès Mostafaoui a présenté ses travaux …
On 8 March 2024, many poppies grew in the ETIS laboratory. Fortunately, this is not a novelty, but …
L’analyse des discours socialement inacceptables (Social Unacceptable Discourse – SUD) est un sujet très important en sociologie et …
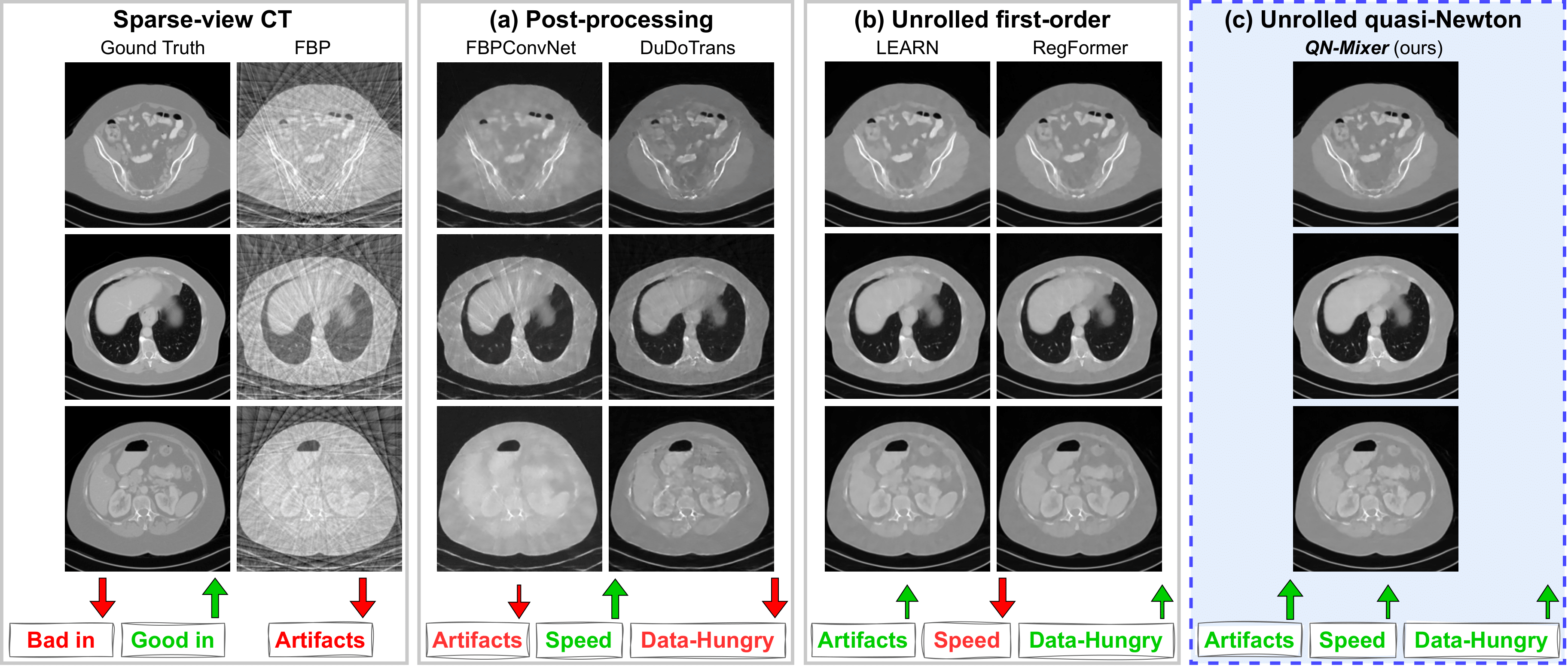
QN-Mixer: A Quasi-Newton MLP-Mixer Model for Sparse-View CT ReconstructionIshak Ayad (1,2), Nicolas Larue (1), Maï K. Nguyen (1)(1) …
ETIS is recruiting new academic staff for 2024: You can consult the detailed profiles in the recruitment area …
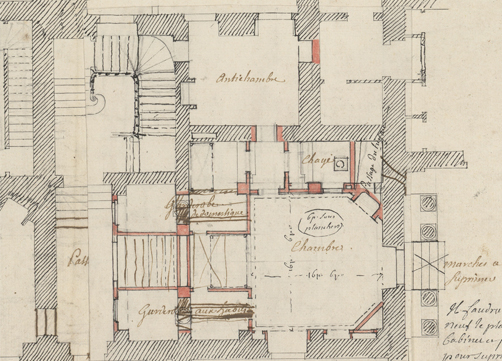
Depuis 2013, le Centre de recherche du château de Versailles pilote le programme VERSPERA, un ambitieux projet de …
ETIS will be very happy to guide you and support you in the application process for the CNRS 2024 competitive …
